English
English
English
English





清华大学车辆学院自动驾驶汽车实验室由杨殿阁教授领衔,致力于高级别自动驾驶的科学原理和全栈算法研究,突破自动驾驶汽车的核心关键技术。实验室拥有强大的教师团队,曾获得多个国家级奖项,并孵化了学生科技创新企业。

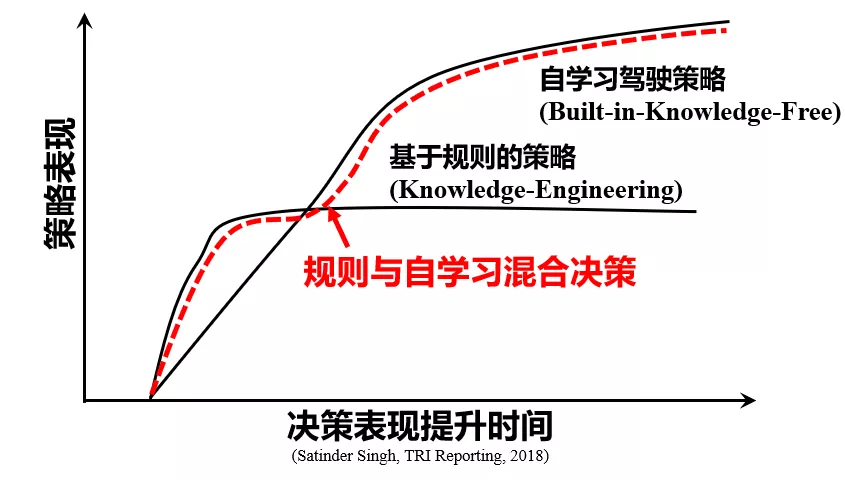
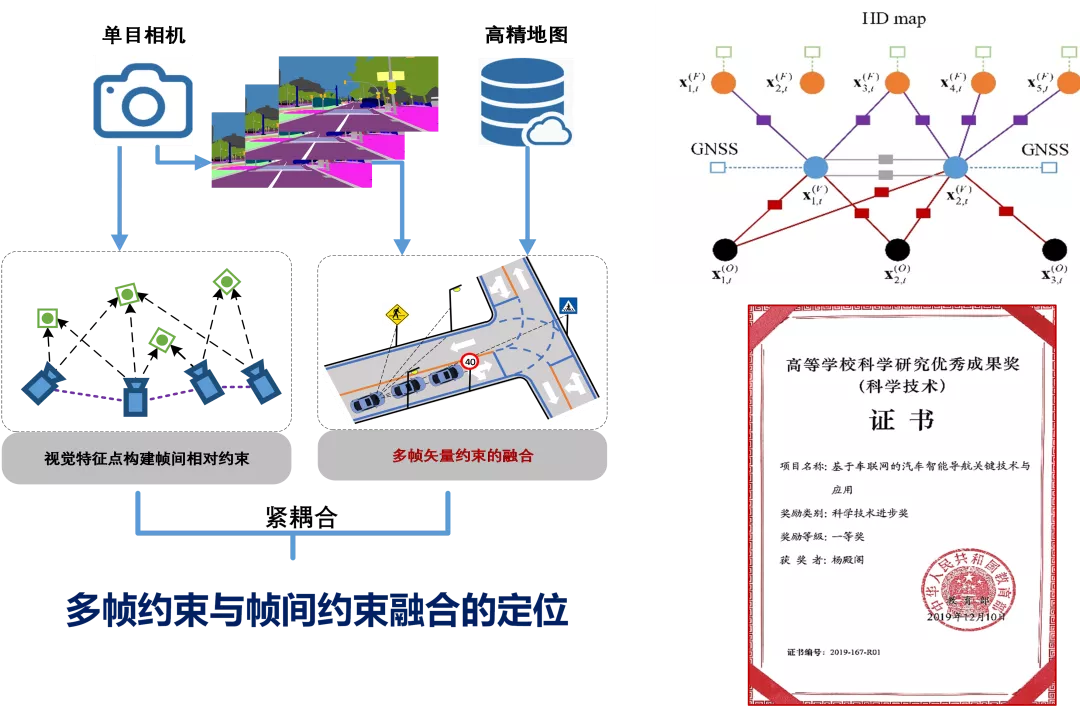
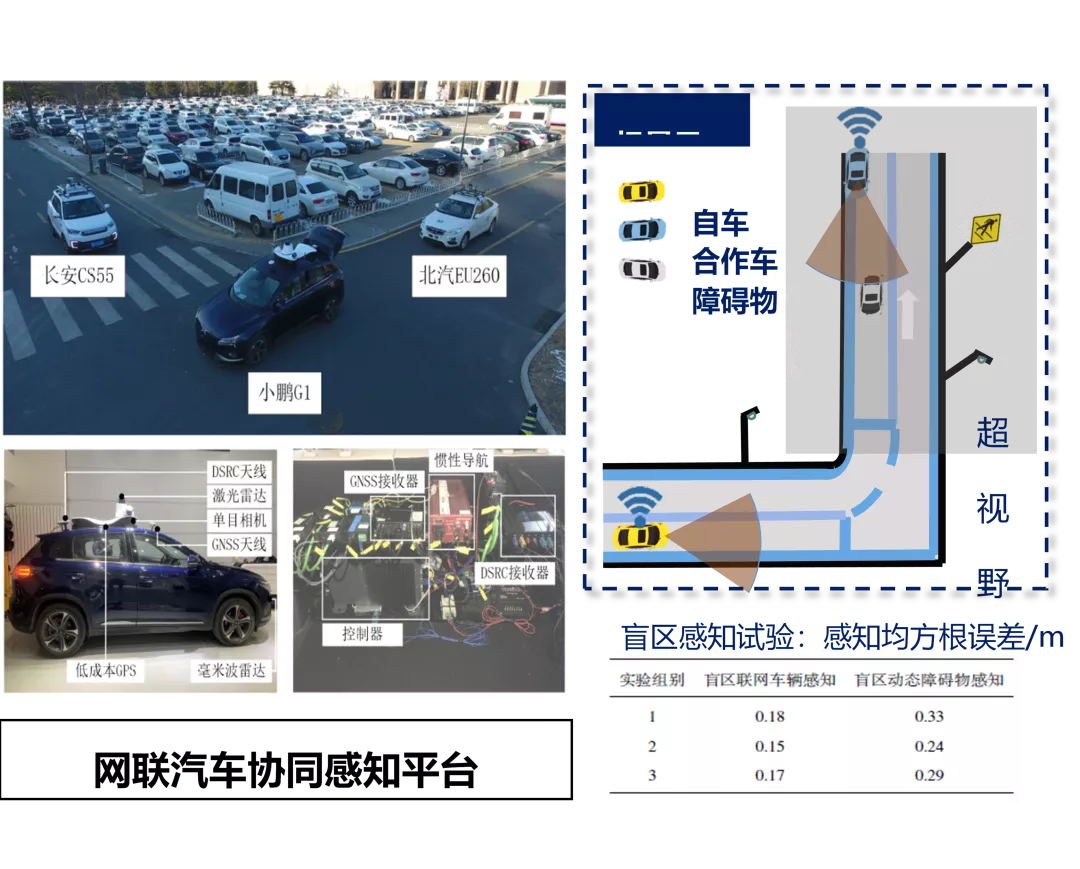
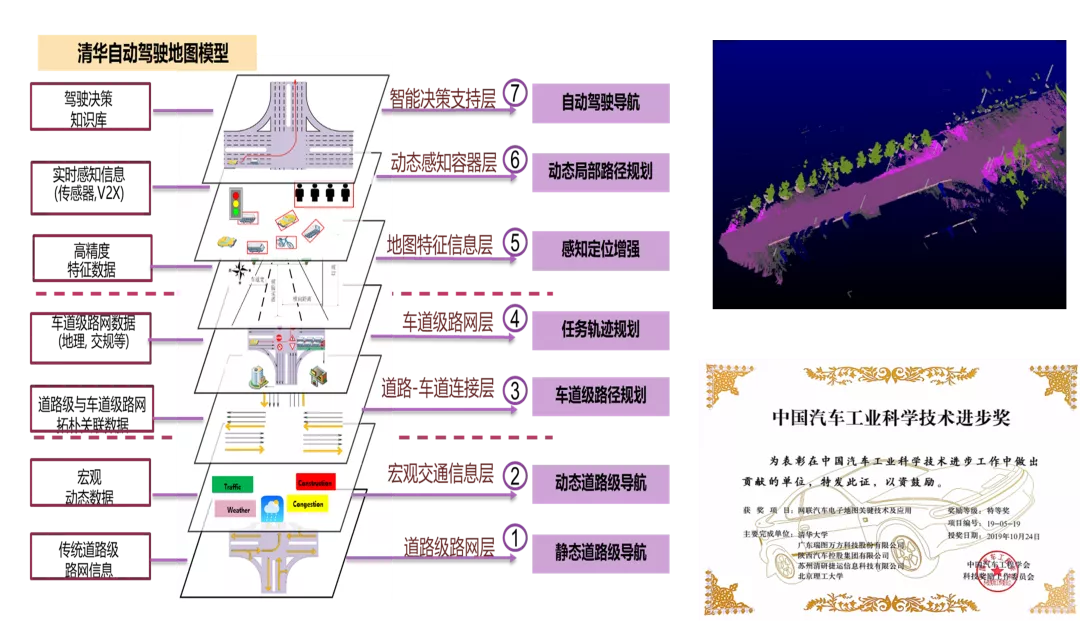
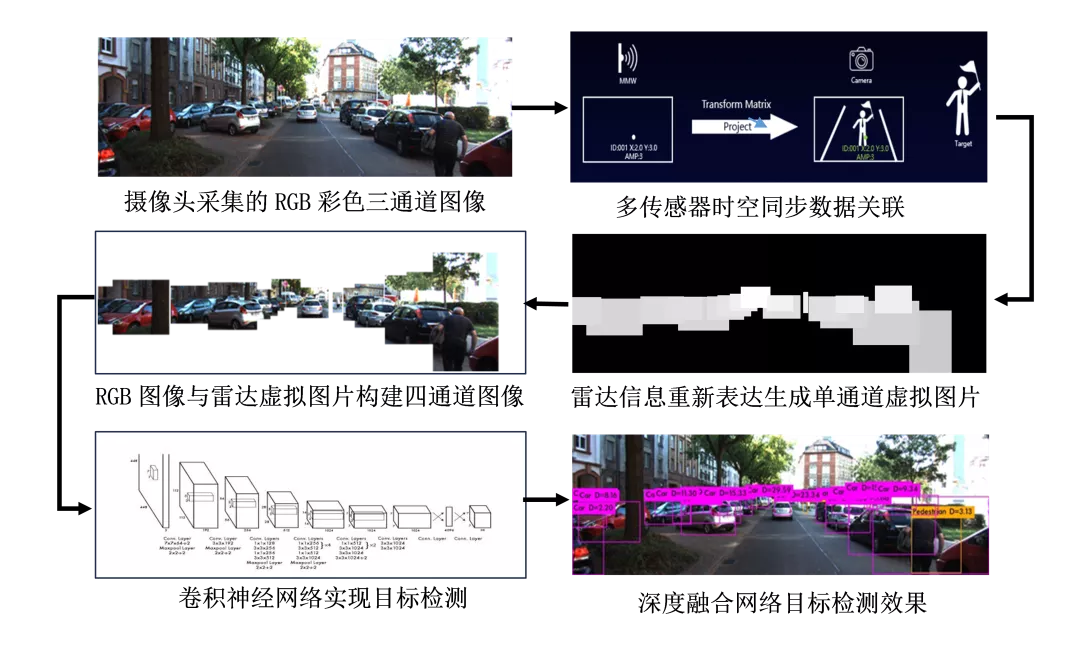
课题组的主要研究方向包括融合感知、智能决策。中国有世界上最复杂的人车道路交通环境,其准确可靠的感知是高级别自动驾驶实现突破的关键瓶颈技术。课题组重点研究以地图为超级感知容器构建车-路-云多模态感知融合理论,建立中国标准自动驾驶AI感知系统,实现中国复杂场景下的融合一体化准确感知认知。同时在感知认知的基础上,探索自动驾驶的安全决策机理,研究深度强化学习等在线学习理论,实现自动驾驶决策能力的自进化与迁移。